
单目标追踪综述
![]()
图1. 单目标追踪示意图。图片来自数据集TrackingNet.
1. 任务介绍
单目标追踪的输入是一个视频序列,在第一帧中给定目标的检测框,而后在视频中实现对该目标的追踪。相比于多目标追踪,单目标追踪的优势主要在于 1)一般计算量较小,适用于终端设备,2)追踪目标可以任意,无需预先设定。其在军事领域(如弹头制导)、体育娱乐(如抖音人机互动)、生产应用(如大疆无人机跟拍)等领域有着重要应用价值。
2. 主要难点
-
目标形变。目标的尺寸变化(由远及近)、或是角度变化(正面到侧面)。目标的形变 1)一方面提高了对特征鲁棒性的要求,2)一方面提高了目标框预测的要求,使其能适应不断变化的目标外形。
-
目标消失重现。目标由于遮挡、或出视野,造成目标消失后重现。这一问题的主要难点在于,1)如何判断目标的消失,及时停止目标模型的更新; 2) 对再出现的目标进行重识别与追踪。目标的重识别(或重检测)不仅需要在较大甚至全图区域进行目标的检索;更困难的是,要利用非常有限的信息(第一帧的标注信息和准确性存疑的追踪结果),在可能存在大量相似的目标内实现对追踪目标的准确识别。
-
相似目标的区分。如在篮球场中追踪某一运动员,该问题的主要挑战在于,一个通用的追踪模型很难直接区分细类(ID级别)的目标。如何在追踪的过程中更新目标特征,提升特征的区分性,区分同类其他目标,是该问题的核心难点。
-
相机运动或目标快速运动。由于相机抖动或目标快速移动,会使目标出搜索区域,导致追踪失效。如何高效更新搜索区域,使目标始终在搜索区域中,是该问题的一个有效解决方案。
综上来看,单目标追踪的关键技术主要有以下几点:
- 目标表征
- 搜索策略
- 模型更新方法
- 针对不同情况的特殊策略
接下来,我将结合方法框架和上述几个关键技术点,展开对单目标追踪的方法综述。
3. 问题描述
给定一个长度为$ T $的视频序列$ \mathcal{I}=\{\mathbf{I}_1,…,\mathbf{I}_T\} $, 和一个初始目标框 $ \mathbf{G} $。用$\mathcal{y}_t= \{\mathbf{b}_t,\mathbf{o_t}\} $代表第$t$帧目标的状态变量,其中,$\mathbf{b}_t\in \mathbb{R}^{1\times 4}$ 代表目标的边界框,$o_t\in \{0,1\}$代表目标出现与否。用$\mathcal{Y}=\{\mathcal{y}_1,…,\mathcal{y}_T\}$代表整个视频序列$\mathcal{I}$的追踪结果。那么,单目标追踪就可以描述为:
\[\underset{\mathcal{Y}}{\mathrm{argmax}}~~~P(~\mathcal{Y}~|~\mathcal{I},\mathbf{G})\]即给定序列$\mathcal{I}$和初始目标框$\mathbf{G}$,估计目标在每一时刻$t$的状态$\mathcal{y}_t$。
4. 方法介绍
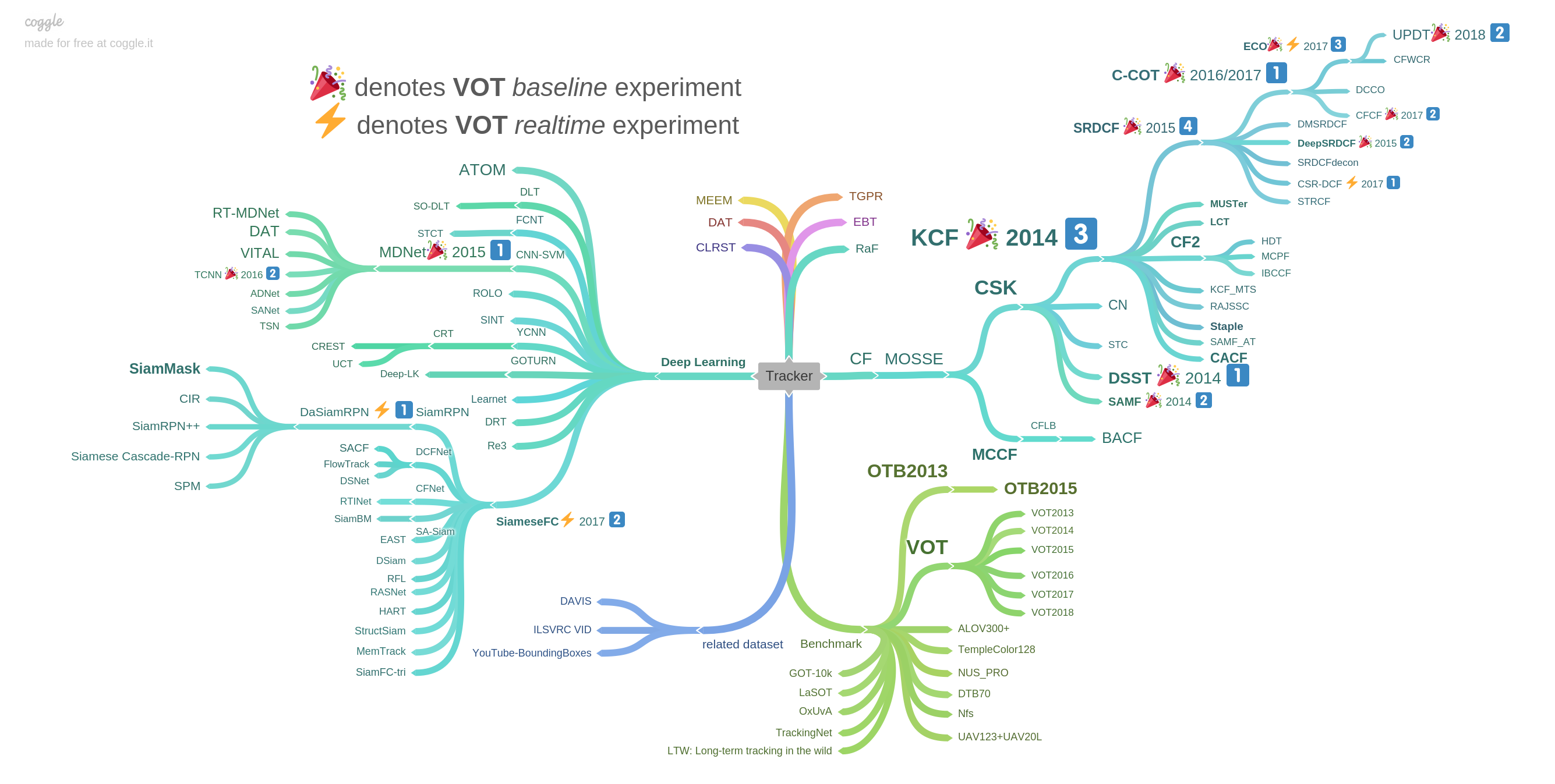
单目标追踪算法演化树,图片来自Visual Tracking Paper List.
目前单目标追踪方法的分类多种多样。为梳理清单目标追踪方法的演变及目前主流的追踪方法,本文将根据单目标方法的演化历史,挑选一些关键的方法进行介绍。
4.1 基于相关滤波
4.1.1 Correlation Filter (CF)
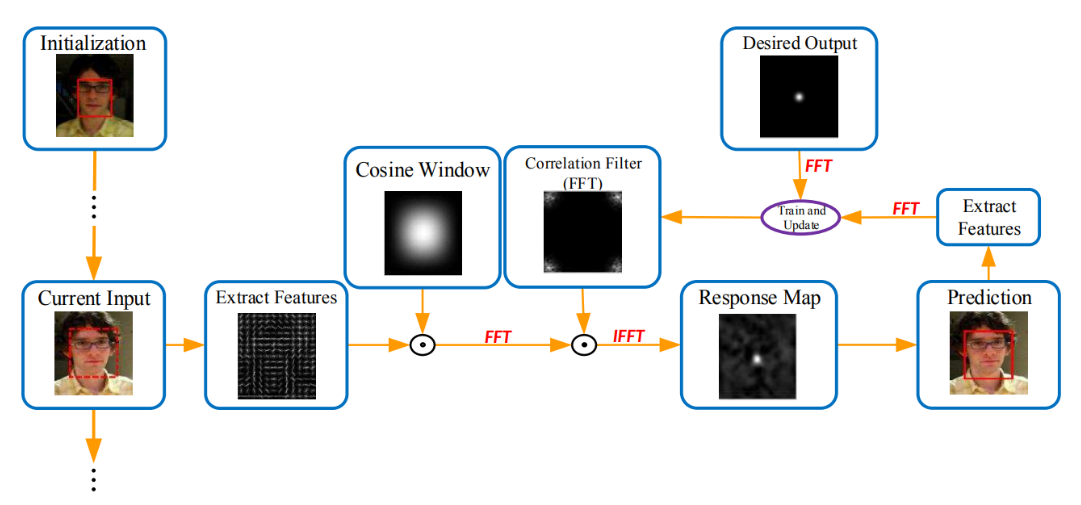 图2. 相关滤波流程图。图片来自参考资料[4]。
图2. 相关滤波流程图。图片来自参考资料[4]。
相关滤波(Correlation Filter)的原理就是,卷积的输出代表两个输入信号f和g的相关性。相关性越高,响应越强。相关性越低,响应越弱。将上述思想应用于单目标追踪任务,我们用给定目标的模板特征(信号f)去卷积新输入图片的特征(信号g),得到一个响应图(Response Map)。响应最大的地方,就是给定目标在新输入图片的出现位置。这就是CF做单目标追踪的核心思想。为降低计算复杂度,一般都通过快速傅里叶变化(Fast Fourier Transform, FFT)将输入图像特征转换到频域,而后在频域进行矩阵内积,得到的结果再通过逆傅里叶变换(IFFT)得到响应图。
图2展示了一般CF追踪的框架图。第一步, 特征提取。在初始阶段,根据给定的目标框进行抠图,提取目标的特征图$\mathbf{F}$。而后,对于新输入的图片进行特征提取,并使用Cosine window对输入特征进行滤波(缓解边界效应),得到输入图像的特征图$\mathbf{G}$。第二步,响应图计算。分别对特征图$\mathbf{F}$和$\mathbf{G}$进行FFT,得到相应的频域特征图$\mathbf{F}^* $和$\mathbf{G}^* $。在频域对他们进行矩阵点积,得到频域的响应图 $\mathbf{R}^* $:
\[\mathbf{R}^*=\mathbf{F}^*\odot \mathbf{G}^*,\]并对$\mathbf{R}^* $进行IFFT,得到响应图$\mathbf{R}$。 第三步,目标定位与滤波器更新。响应图$\mathbf{R}$的峰值位置就代表着目标的位置。而后,通过设计ground-truth响应图(对应图中desired output,一般为2D高斯分布,最大值位置为目标位置),用$\mathbf{D}$代表。并结合图像特征$\mathbf{G}$,实现目标特征$\mathbf{F}$的更新:
\[\mathbf{F}^*_{update} =\frac{\mathbf{D}^*}{\mathbf{G}^*},\]该处为element-wise矩阵除。
4.1.2 MOSSE: Visual object tracking using adaptive correlation filters
MOSSE (Minimizing Sum of Squared Error) 使用灰度图像作为输入。相比于CF的主要改进在于,假定目标可以出现在任何位置(而不是在正中间)并使用多个训练样本进行训练。目标函数可写为:
\[\underset{\mathbf{F}^*}{\mathrm{min}}~~~\underset{i}{\sum} | \mathbf{F}^*\odot \mathbf{G}^*_i - \mathbf{D}^*_i|,\]其中,$\mathbf{G}^*_i,\mathbf{D}$分别为输入图片特征、ground-truth的FFT变换。
上式的解可写为:
\[\mathbf{F}^*_{update}=\frac{\sum_i \mathbf{D}^*_i\odot \overline{\mathbf{G}^*_i}}{\sum_i \mathbf{G}^*_i\odot \overline{\mathbf{G}^*_i}},\]其中,分子为输入图片特征和ground-truth的相关滤波,分母为输入图片特征的energy spectrum。
4.1.3 CSK: Exploiting the Circulant Structure of Tracking-by-Detection with Kernels
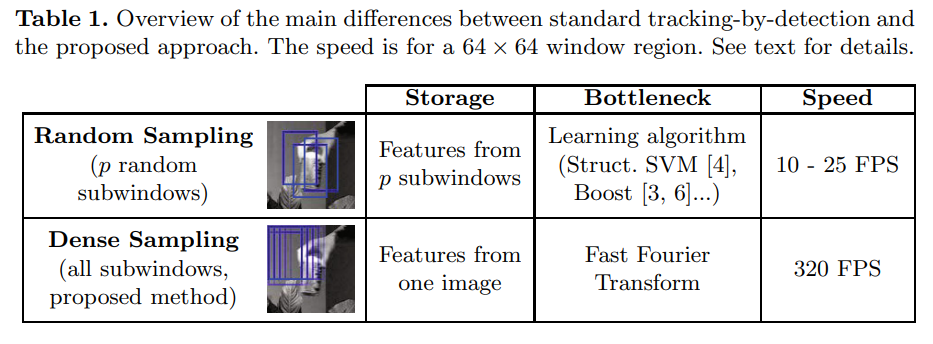
CSK相比于MOSSE的主要改进在于:
- 使用密集采样替代随机采样,并利用循环矩阵提高计算效率
- 利用核技巧,提出核函数最小二乘求解法(kernel regularized least square solution)
1)核函数最小二乘法
具体来说,CSK在目标框周边密集采集一圈目标图片$(x_1,y_1),…,(x_m,y_m)$,而后用这些带标签的样本训练线性分类器$f(x)=<w,x>+b$:
\[\underset{\mathbf{w},b}{min} \sum_{i=1}^m L(y_i, f(x_i))+\lambda \lVert \mathbf{w}\rVert,\]其中,$y_i$为类别标签,$\lVert \mathbf{w}\rVert$为正则项。$L(y,f(x))=max(0,1-yf(x))$为岭回归(ridge loss)。利用核函数特性,对上式求解,解为输入特征在核空间的线性组合$\mathbf{w}=\sum_i \alpha_i \varphi(x_i)$。对应的权重向量$\mathbf{\alpha}$求解方法为:
\[\mathbf{\alpha}=(K+\lambda I)^{-1}\mathbf{y},\]其中,$K$为核矩阵,每一元素$K_{i,j}=k(x_i,x_j)$, $I$为单位矩阵,$\mathbf{y}$的每一元素为$y_i$。即核函数最小二乘法。
2)密集采样和循环矩阵
我们用$C(\mathbf{u})$代表一个向量$\mathbf{u}$的循环移位矩阵:
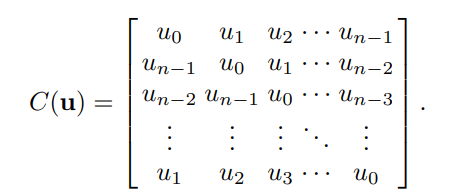
其有如下性质:

即,如果我们按顺序对目标进行密集均匀采样后,这些样本可以拼接成一个循环矩阵。这个循环矩阵和另一个样本的相似性,可以直接在频域内进行点积计算得到。利用上述性质,我们给定一个模板$z$和一个搜索区域$x$,$z$在这片区域的密集相应可以写为:
\[\mathbf{y}=\mathcal{F}^{-1}(\mathcal{F}(\mathbf{k})\odot \mathcal{F}(\mathbf{\alpha})),\]其中,$\mathbf{k}$的每一元素$\mathbf{k}_i=k(\mathbf{z},P^i\mathbf{x})$。上式表明如何计算目标在一个区域内的密集响应。
4.2 基于深度学习
4.3 其他
参考资料
- Benchmarking the State-of-th-Art in Visual Tracking. 吴毅,2014.10.15
- Javed, S., Danelljan, M., Khan, F. S., Khan, M. H., Felsberg, M., & Matas, J. (2021). Visual Object Tracking with Discriminative Filters and Siamese Networks: A Survey and Outlook. arXiv preprint arXiv:2112.02838.
- Yilmaz, A., Javed, O., & Shah, M. (2006). Object tracking: A survey. Acm computing surveys (CSUR), 38(4), 13-es.
- You, S., Zhu, H., Li, M., & Li, Y. (2019). A review of visual trackers and analysis of its application to mobile robot. arXiv preprint arXiv:1910.09761.